
LÝ THUYẾT TRỌNG TÂM VÀ PHƯƠNG PHÁP GIẢI
1. Cùng pha
■ Xét hai dao động cùng pha x và y, có phương trình:
$\left\{ \begin{matrix}x=A\cos \left( \omega t+\varphi \right) \\x=B\cos \left( \omega t+\varphi \right) \\\end{matrix} \right.\Rightarrow \left\{ \begin{matrix}\frac{x}{A}=\cos \left( \omega t+\varphi \right) \\\frac{y}{B}=\cos \left( \omega t+\varphi \right) \\\end{matrix} \right.\Rightarrow \Rightarrow x=\frac{A}{B}y\Rightarrow \left( C>0 \right).$
+) Tại mọi thời điểm x và y luôn cùng dấu.
+) Đồ thị x phụ thuộc vào y là một đoạn thẳng đi qua gốc tọa độ có hệ số góc dương (C).
VD: +) ${{F}_{hp}}=ma:{{F}_{hp}}$và a là 2 dao động điều hòa cùng pha với nhau
+) $p=mv:p$và v là 2 dao động điều hòa cùng pha với nhau…
2. Ngược pha
■ Xét hai dao động ngược pha x và y, có phương trình:
$\left\{ \begin{matrix}x=A\cos \left( \omega t+\varphi \right) \\y=B\cos \left( \omega t+\varphi +\pi \right) \\\end{matrix} \right.\begin{matrix}{} \\=-B\cos \left( \omega t+\varphi \right) \\\end{matrix}\Rightarrow \left\{ \begin{matrix}\frac{x}{A}=\cos \left( \omega t+\varphi \right) \\-\frac{y}{B}=\cos \left( \omega t+\varphi \right) \\\end{matrix}\Rightarrow {{}_{{}}} \right.$
$\Leftrightarrow x=-\frac{A}{B}y\Leftrightarrow \left( C>0 \right)$
+) Tại mọi thời điểm x, y luôn trái dấu.
+) Đồ thị x phụ thuộc vào y là một đoạn thẳng có hệ số góc âm (-C).
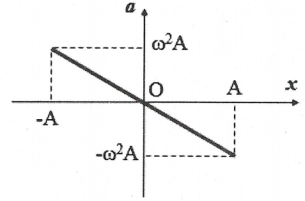
VD: +) $a=-{{\omega }^{2}}x:a$và x là 2 dao động điều hòa ngược pha với nhau.
+) ${{F}_{hp}}=-kx:{{F}_{hp}},x$là 2 dao động điều hòa ngược pha nhau…
3. Vuông pha
■ Xét hai dao động vuông pha x và y, có phương trình:
$\left\{ \begin{matrix}x=A\cos \left( \omega t+\varphi \right) \\y=B\cos \left( \omega t+\varphi +\pi /2 \right) \\\end{matrix} \right.\begin{matrix}{} \\=-B\sin \left( \omega t+\varphi \right) \\\end{matrix}\Rightarrow \left\{ \begin{matrix}\frac{x}{A}=\cos \left( \omega t+\varphi \right) \\\frac{y}{B}=-\sin \left( \omega t+\varphi \right) \\\end{matrix}\Rightarrow {{\left( \frac{x}{A} \right)}^{2}}+{{\left( \frac{y}{B} \right)}^{2}}=1 \right.$
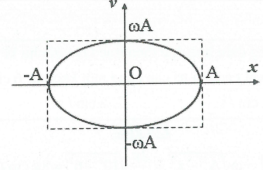
+) Đồ thị x phụ thuộc vào y là một Elip.
VD: +) $\left( x,v \right)$vuông pha: ${{\left( \frac{x}{A} \right)}^{2}}+{{\left( \frac{v}{A\omega } \right)}^{2}}=1\Rightarrow \left\{ \begin{matrix}{{A}^{2}}={{x}^{2}}+\frac{{{v}^{2}}}{{{\omega }^{2}}} \\v=\pm \omega \sqrt{{{A}^{2}}-{{x}^{2}}} \\\end{matrix} \right.$
+) $\left( v,a \right)$ vuông pha: ${{\left( \frac{v}{{{v}_{\max }}} \right)}^{2}}+{{\left( \frac{a}{{{a}_{\max }}} \right)}^{2}}=1$
Chú ý: Sử dụng mối quan hệ độc lập thời gian của hai đại lượng dao động điều hòa vuông pha:
+) Nếu $\frac{x}{A}=0\Rightarrow {{\left( \frac{y}{B} \right)}^{2}}=1\Rightarrow y=\pm B:$ tức, một đại lượng đang ở vtcb thì đại lượng kia đang ở biên
+) Nếu $\frac{x}{A}=\pm \frac{1}{2}\Rightarrow \frac{y}{B}=\pm \frac{\sqrt{3}}{2}.$
+) Nếu $\frac{x}{A}=\pm \frac{1}{\sqrt{2}}\Rightarrow \frac{y}{B}=\pm \frac{1}{\sqrt{2}.}$
4. Bài tập minh họa
| Tính tần số góc của một vật dao động điều hoà. Biết
a) tại thời điểm ${{t}_{1}}$, vật có li độ ${{x}_{1}}$ và vận tốc là ${{v}_{1}}$, tại thời điểm ${{t}_{2}}$ vật có li độ là ${{x}_{2}}\left( {{x}_{1}}\ne {{x}_{2}} \right)$ và vận tốc là ${{v}_{2}}$. b) tại thời điểm ${{t}_{1}}$ vật có vận tốc là ${{x}_{1}}$và gia tốc là a1, tại thời điểm ${{t}_{2}}$vật có vận tốc là ${{v}_{2}}$và gia tốc là ${{a}_{2}}$. |
Lời giải chi tiết:
a) Do $\overrightarrow{x}\bot \overrightarrow{v}$ suy ra ${{\left( \frac{x}{A} \right)}^{2}}+{{\left( \frac{v}{-\omega A} \right)}^{2}}=1.$
Theo đề bài ta có $\left\{ \begin{matrix}{{\left( \frac{{{x}_{1}}}{A} \right)}^{2}}+{{\left( \frac{{{v}_{1}}}{\omega A} \right)}^{2}}=1 \\{{\left( \frac{{{x}_{2}}}{A} \right)}^{2}}+{{\left( \frac{{{v}_{2}}}{\omega A} \right)}^{2}}=1 \\\end{matrix} \right.\Leftrightarrow x_{1}^{2}+\frac{v_{1}^{2}}{{{\omega }^{2}}}=x_{2}^{2}+\frac{v_{2}^{2}}{{{\omega }^{2}}}={{A}^{2}}\Rightarrow {{\omega }^{2}}=\frac{v_{1}^{2}-v_{2}^{2}}{x_{2}^{2}-x_{1}^{2}}$
$.$ Đặc biệt khi $\left\{ \begin{matrix}{{v}_{2}}=0\Rightarrow \left| {{x}_{2}} \right|=A \\{{v}_{1}}={{v}_{\max }}\Rightarrow {{x}_{1}}=0 \\\end{matrix} \right.\Rightarrow \omega =\frac{{{v}_{\max }}}{A}.$
b) Do $\overrightarrow{v}\bot \overrightarrow{a}\Rightarrow \left\{ \begin{matrix}\frac{v_{1}^{2}}{{{\omega }^{2}}}+\frac{a_{1}^{2}}{{{\omega }^{4}}}={{A}^{2}} \\\frac{v_{2}^{2}}{{{\omega }^{2}}}+\frac{a_{2}^{2}}{{{\omega }^{4}}}={{A}^{2}} \\\end{matrix}\Rightarrow {{\omega }^{2}} \right.=\frac{a_{2}^{2}-a_{1}^{2}}{v_{1}^{2}-v_{2}^{2}}\Rightarrow \omega =\sqrt{\frac{a_{2}^{2}-a_{1}^{2}}{v_{1}^{2}-v_{2}^{2}}.}$
$.$ Đặc biệt khi $\left\{ \begin{matrix}{{v}_{2}}=0\Rightarrow \left| {{a}_{2}} \right|={{a}_{\max }} \\{{v}_{1}}={{v}_{\max }}\Rightarrow {{a}_{1}}=0 \\\end{matrix} \right.\Rightarrow \omega =\frac{{{a}_{\max }}}{{{v}_{\max }}}.$